学ぶ・知る
周公大で「赤ちゃんロボット」成果報告 徳山高専生が機構試作






周南公立大学と徳山工業高等専門学校による連携プロジェクト「赤ちゃん人形を動かしたいプロジェクト」の成果報告会が3月26日、周南公立大学(周南市学園台)で開かれた。
[広告]
同プロジェクトは両校の共同教育活動の一環。周公大看護学科の実習で使う乳幼児モデル人形は、泣き声や呼吸は再現できる一方、体の動きがないことが課題となっていた。2024年9月の交流見学会でこの課題が共有され、取り組みが始まった。
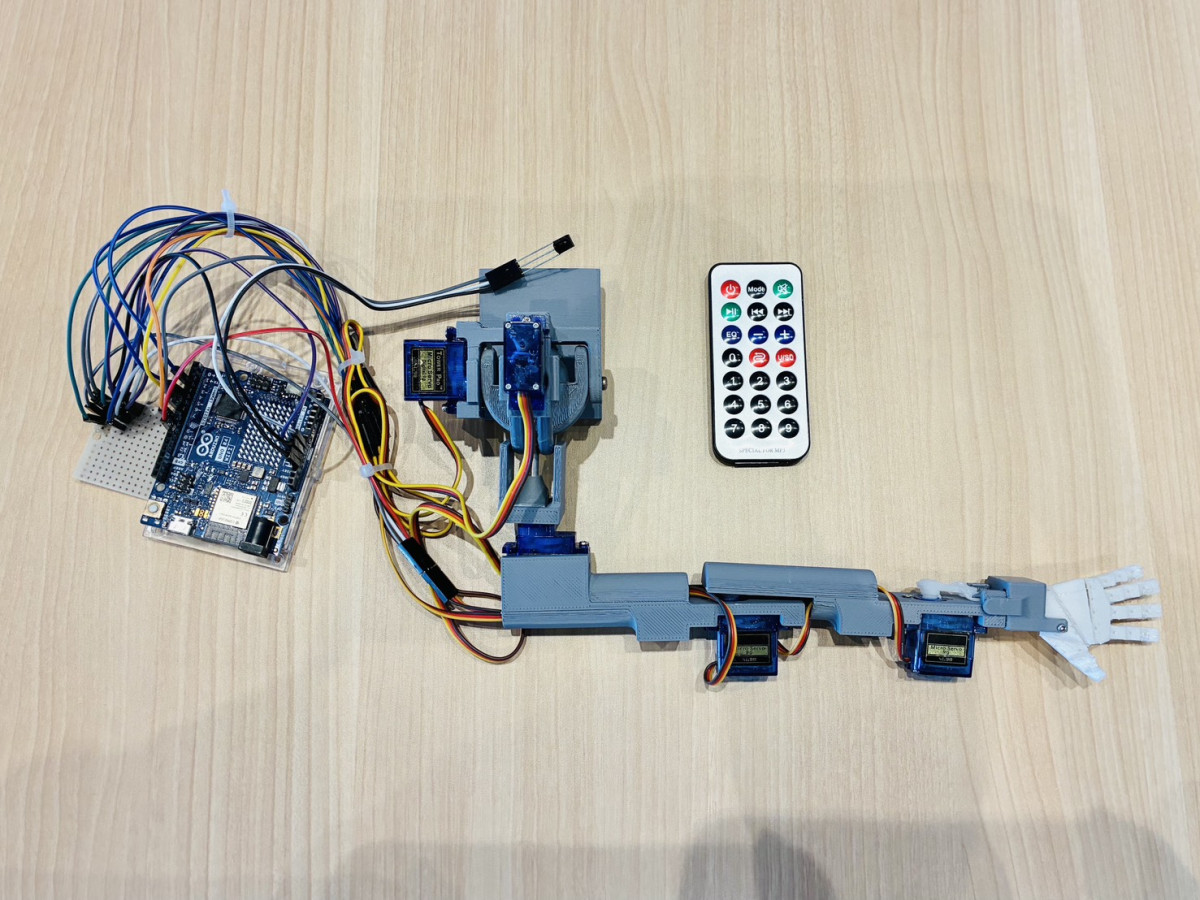
開発は2025年4月から、徳山高専機械電気工学科4年の授業で進めた。上村尽さんとシリパン・パンナトーンさんが、シリコーン製人形の内部に組み込む動作機構の試作に取り組んだ。
報告会では、上村さんが足、パンさんが腕の動きをそれぞれ発表した。
足の機構は、触れた強さに応じて動く速度が変わる仕組み。接触に対する反応の違いを再現できるようにした。上村さんは「3Dプリンターで何度も作り直しながら形状を調整した。実際に近い動きを再現することで、看護学生のリアルな実習につながれば」と話す。
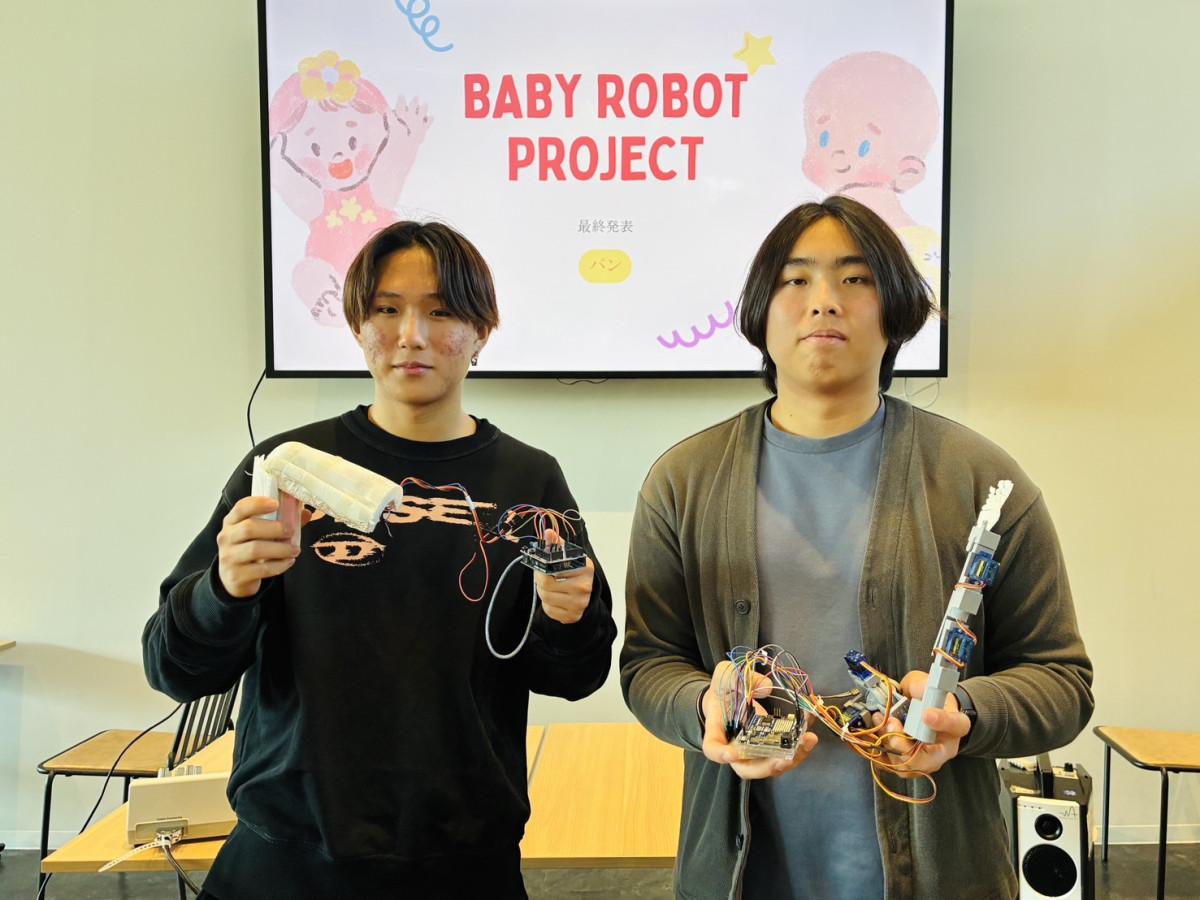
腕の機構は、モーターと制御装置で動作を実現した。当初は糸で引く方式を検討したが、リアルな動作を目指し、関節部分も含めて試作を重ねた。パンさんは「より小型で出力の高いモーターへの改良を進め、人の役に立つものづくりにつなげたい」と話す。

最新ニュース





学ぶ・知る



見る・遊ぶ




食べる





暮らす・働く









周南経済新聞を応援しています